

Różnica między enkoderami bezwzględnymi i przyrostowymi

- 1830
- 376
- Maksym Cieślik
Wykrywanie ruchu kątowego i liniowego jest kluczową funkcją w kontrolowaniu maszyn w fabryce elektroniki. Mikrokomputery w tych maszynach często potrzebują informacji o położeniu, kierunku obrotu i prędkości obrotu wału lub osi, które należy przekonwertować w formę cyfrową. Kodery optyczne to urządzenia elektro-mechaniczne używane do pomiaru pozycji kątowych lub liniowych. Te użyte do wykrywania kątowego są powszechnie określane jako enkodery obrotowe lub wału. Są one coraz bardziej używane do wielu miejsc pracy w sprzęcie konsumenckim i przemysłowym. Enkodery obrotowe lub enkodery wału mogą zasadniczo być bezwzględne lub przyrostowe. Absolutny koder dostarcza informacji o pozycji, gdy moc zostanie utracona, podczas gdy używany jest przyrostowy enkoder, w którym wymagane są informacje o prędkości i kierunku. Oba mogą być używane z przemieszczeniami kątowymi i liniowymi, ale działają inaczej. Przyjrzyjmy się szczegółowo, jak się od siebie różnią.
Co to jest absolutny koder?
Absolutny koder ma unikalny kod dla każdej pozycji wału, który reprezentuje bezwzględną pozycję enkodera. Zapewnia bezpośrednio cyfrowe wyjście reprezentujące bezwzględne przemieszczenie. Wartość rzeczywistej pozycji jest mierzona natychmiast w momencie włączenia systemu. Zatem bezwzględny enkoder nie potrzebuje licznika, ponieważ zmierzona wartość pochodzi bezpośrednio ze wzoru ukończenia studiów. Zapewnia dane wyjściowe cyfrowe odpowiadające bezpośrednio pozycji. Każda pozycja bitowa jest osobno kodowana przez dedykowaną parę LED. Każdy kod reprezentuje bezwzględną pozycję kątową wału w jego obrotie. Dysk bezwzględnego enkodera używa szarego kodu, w którym jeden bit się zmienia na raz, co zmniejsza błędy komunikacji enkodera. Można je podzielić na enkodery jednorazowe i wielokrotne.
Co to jest enkoder przyrostowy?
Przyrostowy enkoder to urządzenie elektroechaniczne, które przekształca pozycję kątową wału w sygnały cyfrowe lub impulsowe. Generuje pewną liczbę impulsów na rewolucję, zapewniając impuls dla każdego przyrostu odpowiadającego rewolucji. Może mierzyć zmianę pozycji, a nie położenie bezwzględne. Dlatego nie może określić pozycji w stosunku do znanego odniesienia. Liczba wytworzonych impulsów jest proporcjonalna do pozycji kątowej wału. Przyrostowe enkodery są używane w aplikacjach, w których wymagana jest prędkość lub informacje o prędkości i kierunku. Za każdym razem, gdy urządzenie jest włączane lub resetu, zaczyna liczyć od zera i generuje sygnał wyjściowy za każdym razem, gdy wał. Rodzaje przyrostowego enkodera mogą dalej podzielić się na enkodery kwadraturowe i tachometry.
Różnica między enkoderami bezwzględnymi i przyrostowymi
Podstawy absolutnego vs. Przyrostowe enkodery
- Oba są urządzeniami elektroechanicznymi używanymi do pomiaru pozycji kątowych lub liniowych wału i konwersji na sygnały cyfrowe lub impulsowe. Absolutny enkoder ma unikalny kod dla każdej pozycji wału, który reprezentuje bezwzględną pozycję enkodera, podczas gdy enkoder przyrostowy generuje sygnał wyjściowy za każdym razem, gdy wał obraca określony kąt wał. Przyrostowy enkoder może mierzyć zmianę pozycji, a nie położenie bezwzględne.
Zasada działania absolutnego vs. Przyrostowe enkodery
- Absolutny enkoder składa się z binarnego dysku zamontowanego na wale, tak że obraca się z wałem. Dzięki wielu kanałom wyjściowym każda pozycja kątowa wału jest opisana przez własny unikalny kod. Liczba kanałów wzrasta wraz ze wzrostem wymaganej rozdzielczości. W przeciwieństwie do przyrostowego enkodera, nie jest to urządzenie do zliczania, które nie traci informacji o pozycji, gdy moc zostanie utracona. Z drugiej strony przyrostowy enkoder zapewnia sygnał wyjściowy dla danego przyrostu pozycji kątowej wału, który jest określany przez zliczenie impulsów wyjściowych w stosunku do punktu odniesienia.
Wydajność kosztów
- Matryca kodu dysku enkodera jest bardziej złożona, a ponieważ wymagane jest więcej czujników światła, bezwzględny enkoder zazwyczaj kosztuje dwa razy więcej niż enkodery przyrostowe. Rozdzielczość jest ograniczona liczbą ścieżek na dysku enkodera, więc uzyskanie drobniejszych rozdzielczości staje się droższe. Przeciwnie, przyrostowe enkodery są mniej złożone niż ich bezwzględne odpowiedniki, a zatem zwykle tańsze.
Stabilność
- Bezwzględne kodery mogą oferować lepszą wydajność, dokładne wyniki i niższe koszty ogólne. Dzięki jego zdolności do zapewnienia absolutnych odczytów kątowych, nawet jeśli odczyt zostanie pominięty, nie wpłynie to na następne odczyt. Szczególne odczyt nie zależy od dokładności poprzedniego czytania. Z drugiej strony przyrostowy enkoder musi być zasilany przez cały czas obsługi urządzenia. Za każdym razem, gdy moc jest utracona, odczyt musi być ponowna inicjatyzowana lub system pokazuje błąd. To spowalnia wydajność systemu. Bezwzględne kodery nie tracą informacji o pozycji w przypadku awarii zasilania.
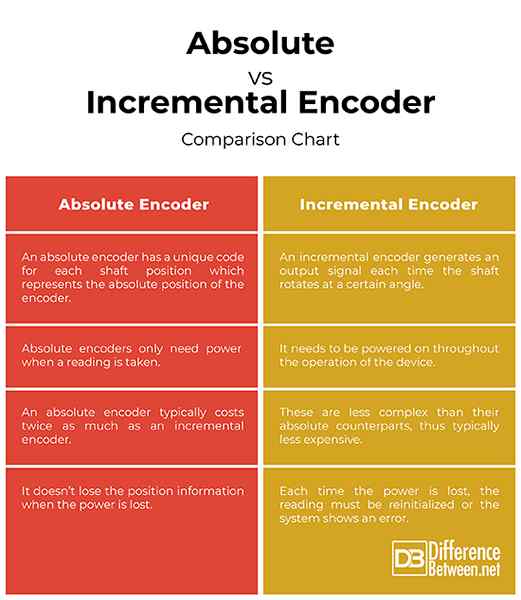
Absolutny kontra. Przyrostowy enkoder: wykres porównawczy
Podsumowanie absolutnego vs. Przyrostowe enkodery
Krótko mówiąc, przyrostowy enkoder musi być zasilany podczas działania urządzenia. W przypadku awarii zasilania odczyt musi zostać ponownie zareitializowany lub system wprowadza błąd. Absolutny koder, wręcz przeciwnie, potrzebuje mocy tylko wtedy, gdy odczyt jest podejmowany i dzięki jego zdolności do zapewnienia odczytów bezwzględnych kąt. Jednak macierz kodu dysku w bezwzględnym enkoderze jest bardziej złożona, a zatem zwykle kosztuje dwa razy więcej niż enkoder przyrostowy, który z drugiej strony jest mniej złożony, więc kosztuje tańsze koszty tańsze.