

Różnica między znakiem statycznym a znakiem dynamicznym w NMOS
- 4245
- 144
- Krystyna Urbanowicz
Ci z was, którzy dobrze znają swoją fizykę, będą mieli pojęcie o tym, o czym jest ten artykuł. Dla tych, którzy tego nie robią, upewnijmy się, że omówimy obwody i rozpraszanie mocy, które odbywa się w obwodach. Kiedy używamy skrótów NMO, które jest krótkie w przypadku półprzewodnika tlenku metalu typu N, odnosimy się do logiki wykorzystującej MOSFET, czyli efektywne pola półprzewodników typu N typu N-typu. Odbywa się to w celu wdrożenia wielu różnych obwodów cyfrowych, takich jak bramy logiczne.
Na początek tranzystory NMOS mają 4 tryby działania; Triode, odcięcie (znane również jako podtrzymanie), nasycenie (zwane również aktywnym) i nasycenie prędkości. Istnieje rozproszenie mocy, w którym stosuje się to, który jest używany, a raczej mówienie, istnieje rozpraszanie mocy w dowolnym obwodzie, który jest wykonany i działa. Ta utrata mocy ma element statyczny i dynamiczny i może być trudnym zadaniem, aby je rozróżnić w symulacjach. To jest powód, dla którego ludzie mogą nie być w stanie ich odróżnić od siebie. Stąd rozwój terminologicznego rozróżnienia dwóch rodzajów znaków, mianowicie statycznych i dynamicznych. W zintegrowanych obwodach NMOS jest tym, co możemy nazywać cyfrową rodziną logiki, która wykorzystuje pojedyncze napięcie zasilania, w przeciwieństwie do starszych rodzin logicznych NMOS, które wymagały więcej niż jednego napięcia zasilającego.
Aby odróżnić te dwa proste słowa, możemy powiedzieć, że postać statyczna jest taka, która nie ulegnie ważnej zmianie w żadnej części i pozostanie zasadniczo taka sama na końcu, jak na początku. W przeciwieństwie do tego, dynamiczna postać odnosi się do tej, która w pewnym momencie ulegnie ważnej zmianie. Zauważ, że ta definicja i różnicowanie nie są specyficzne dla znaków statycznych i dynamicznych w NMO, ale odnosi się do ogólnego rozróżnienia między dowolnym znakiem statycznym i dynamicznym. Umieszczając je w odniesieniu do NMO, możemy wyciągnąć prosty wniosek, że znaki statyczne w NMO nie wykazują żadnych zmian w trakcie życia obwodu, podczas gdy dynamiczne postacie wykazują pewną zmianę w tym samym kursie.
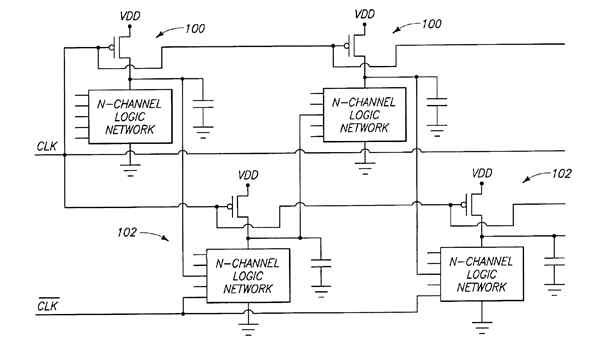
Obwody NMOS są zwykle używane do przełączania wysokiej prędkości. Obwody te używają tranzystorów NMOS jako przełączników. Podczas korzystania z statycznej bramy NAND na ich obwodach bramek stosuje się dwa tranzystory. Podłączenie zbyt wielu tranzystorów wejściowych w szeregu nie jest zalecane, ponieważ może zwiększyć czas przełączania. W statycznej ani bramie dwa tranzystory są połączone równolegle. Z drugiej strony, w dynamicznych obwodach NMOS, podstawową metodą jest przechowywanie wartości logicznych przy użyciu pojemności wejściowych tranzystorów NMOS. System dynamiczny działa w małym systemie mocy rozpraszania. Ponadto obwody dynamiczne zapewniają lepszą gęstość integracji w porównaniu z ich statycznymi odpowiednikami. Jednak system dynamiczny nie zawsze jest najlepszą opcją, ponieważ wymaga więcej poleceń jazdy lub więcej logiki w przeciwieństwie do systemu statycznego.
Podsumowanie różnic wyrażonych w punktach
1. Postać statyczna jest taka, która nie ulegnie ważnej zmianie w żadnej części i pozostaje zasadniczo taka sama na końcu, jak na początku. W przeciwieństwie do tego, dynamiczna postać odnosi się do tej, która w pewnym momencie ulegnie ważnej zmianie
2. Statyczne postacie w NMO nie wykazują żadnych zmian w trakcie życia obwodu, podczas gdy dynamiczne postacie wykazują pewną zmianę w tym samym kursie
3. Podczas korzystania z statycznej bramy NAND na ich obwodach bramek stosuje się dwa tranzystory. Podłączenie zbyt wielu tranzystorów wejściowych w szeregu nie jest zalecane, ponieważ może zwiększyć czas przełączania. W statycznej ani bramie dwa tranzystory są połączone równolegle. Z drugiej strony, w dynamicznych obwodach NMOS, podstawową metodą jest przechowywanie wartości logicznych przy użyciu pojemności wejściowych tranzystorów NMOS
4. Obwody dynamiczne zapewniają lepszą gęstość integracji, podczas gdy obwody statyczne oferują biedniejszą gęstość integracji stosunkowo
5. Systemy dynamiczne nie zawsze są najlepszą opcją, ponieważ potrzebują więcej poleceń jazdy lub więcej logiki; Systemy statyczne wymagają mniejszych poleceń logicznych lub wejściowych